1. Signaux déterministes à énergie finie
La densité spectrale d’énergie du signal \(x(t)\) est donnée par la relation : \[S_{xx}(f)=|X(f)|^2\]
On sait que : \[|Y(f)|^2=|H(f)|^2~|X(f)^2|\]
Le signal \(y(t)\) résulte d’une transformation déterministe appliquée à un signal déterministe. Ce signal est donc déterministe. Calculons son énergie \(E_y\). D’après le théorème de Parseval : \[E_y=\int_{-\infty}^{+\infty}|y(t)^2~dt=\int_{-\infty}^{+\infty}|Y(f)|^2~df=\int_{-\infty}^{+\infty}|X(f)|^2~|H(f)|^2~df\]
Par ailleurs, le filtre étant supposé stable : \[|H(f)|=|\int_{-\infty}^{+\infty}h(t)~e^{-j2\pi ft}~dt| \quad\leq\quad |\int_{-\infty}^{+\infty}h(t)|~dt\quad\leq~M~<+\infty\]
Le signal est bien d’énergie finie, car : \[E_y\quad\leq\quad M^2\int_{-\infty}^{+\infty}|X(f)|^2~df \quad<~+\infty\]
On constate donc que la densité spectrale d’énergie est donnée par : \[S_{yy}(f)=|Y(f)|^2=|H(f)|^2~S_{xx}(f)\]
2. Signaux déterministes de puissance finie
Nous connaissons la relation de la DSP du signal avec la fonction d’auto-corrélation :
\[\begin{aligned} S_{xx}(f) &= TF\{R_{xx}(\tau)\} \\ R{xx}(\tau) &= lim_{T\rightarrow +\infty}\left\{\frac{1}{T}\int_{-T/2}^{+T/2}x(t)~\overline{x(t-\tau)}~dt \right\} \end{aligned}\]
Calculons donc la fonction d’auto-corrélation du signal de sortie \(y(t)\) en le supposant de puissance finie, ce qui sera justifié à la fin du calcul. Rappelons que :
\[\begin{aligned} y(t)&=x(t)\star h(t)=\int_{-\infty}^{+\infty}h(u)~x(t-u)~du\\ R_{xx}(\tau)&=lim_{T\rightarrow\infty}\left\{\frac{1}{T}\int_{-T/2}^{+T/2}y(t)~\overline{y(t-\tau)}~dt\right\}\end{aligned}\]
On a donc l’intégrale triple : \[R_{xx}(\tau)=\int_{-\infty}^{+\infty}\int_{-\infty}^{+\infty}h(u)~\overline{h(v)}\left\{lim_{T\rightarrow \infty}\frac{1}{T}\int_{-T/2}^{+T/2}x(t-u)~\overline{x(t-\tau-v)}~dt\right\}dv~du\]
La quantité entre accolades n’est autre que \(R_{xx}(\tau-u+v)\). On a donc : \[R_{xx}(\tau)=\int_{-\infty}^{+\infty}\int_{-\infty}^{+\infty}h(u)~\overline{h(v)} ~ R_{xx}(\tau-u+v)~du~dv\] Dans cette intégrale double, effectuons le changement de variables défini par : \[u=u \ \ \ ; \ \ \ w=u-v\]
Le jacobien \(J\) de cette transformation est : \[\left( \begin{array}{cc} {\partial u}/{\partial u}&{\partial u}/{\partial w}\\ {\partial v}/{\partial u}&{\partial v}/{\partial w} \end{array} \right) = \left( \begin{array}{cc} 1&0\\ 1&-1 \end{array} \right) = (-1)\]
Soit :
\[\begin{aligned} R_{yy}(\tau)&=\int_{-\infty}^{+\infty}\int_{-\infty}^{+\infty}h(u)~\overline{h(u-w)} ~R_{xx}(\tau-w)~|J|~dw~du\\ R_{yy}(\tau)&=\int_{-\infty}^{+\infty}\left\{\int_{-\infty}^{+\infty}h(u)~\overline{h(u-w)}~du\right\}R_{xx}(\tau-w)~dw\end{aligned}\]
On pose : \[R_{hh}(w)=\int_{-\infty}^{+\infty}h(u)~\overline{h(u-w)}~du\]
D’où :
\[\begin{aligned} R_{yy}(\tau)&=\int_{-\infty}^{+\infty}R_{hh}(w)~R_{xx}(\tau-w)~dw\\ R_{yy}(\tau)&=R_{xx}(\tau)\star R_{hh}(\tau)\end{aligned}\]
La fonction : \[R_{hh}(\tau)=\int_{-\infty}^{+\infty}h(u)~\overline{h(u-\tau)}~du\] est appelée fonction d’auto-corrélation du filtre.
Passons maintenant au calcul de \(S_{yy}(f)=TF\{R_{yy}(\tau)\}\).
D’après le théorème de Plancherel : \[TF\{R{yy}(\tau)\}=TF\{R{xx}(\tau)\}\star TF\{R{hh}(\tau)\}\]
Par ailleurs : \[R_{hh}(\tau)=h(\tau)\star\overline{h(-\tau)} \quad \Rightarrow \quad TF{R_{hh}(\tau)}=H(f)~\overline{H(f)}=|H(f)|^2\]
On retrouve la relation générale : \[S_{yy}(f)=S_{xx}(f)~|H(f)|^2\]
Calculons la puissance de \(y(t)\) :
\[\begin{aligned} P_y&= \int_{-\infty}^{+\infty}S_{yy}(f)~df=\int_{-\infty}^{+\infty}|H(f)|^2~S_{xx}(f)~df\\ P_y&\leq M^2\int_{-\infty}^{+\infty}S_{xx}(f)~df=M^2P_x<+\infty\end{aligned}\]
3. Signaux aléatoires
Nous supposons que l’excitation \(x(t)\) est aléatoire et stationnaire au sens large.
3.1. Propriétés statistiques du signal filtré
3.1.1. Moyenne statistique
\[E\{y(t)\}=E\{x(t)\star h(t)\}=E\left\{\int_{-\infty}^{+\infty}h(u)~x(t-u)~du\right\}\]
L’espérance mathématique \(E\) étant linéaire et par ailleurs \(h\) étant déterministe, on a : \[E\{y(t)\}=\int_{-\infty}^{+\infty}E\big\{h(u)~x(t-u)\big\}~du=\int_{-\infty}^{+\infty}h(u)E\{x(t-u)\}~du\]
Enfin, \(x(t)\) étant supposé stationnaire au sens large : \[E\{x(t-u)\}=\{x(t)\}=cte\]
On a donc : \[E\{y(t)\}=E\{x(t)\}\int_{-\infty}^{+\infty}h(u)du=E\{x(t)\}~H(0)=cte\]
Cette espérance mathématique est indépendante de \(t\) donc le processus est déjà stationnaire au premier ordre.
3.1.2. Auto-corrélation statistique
\[\begin{aligned} R_{yy}(t,\tau)&=E\left\{y(t)~\overline{y(t-\tau)}\right\}\\ R_{yy}(t,\tau)&=E\left\{\int_{-\infty}^{+\infty}h(u)~x(t-u)du\int_{-\infty}^{+\infty}\overline{h(v)~x(t-\tau-v)}~dv\right\}\\ R_{yy}(t,\tau)&=E\left\{\int_{-\infty}^{+\infty}\int_{-\infty}^{+\infty}h(u)~x(t-u)~du~\overline{h(v)~x(t-\tau-v)}\right\}du~dv\\ R_{yy}(t,\tau)&=\int_{-\infty}^{+\infty}\int_{-\infty}^{+\infty}h(u)~\overline{h(v)}~E\left\{x(t-u)~\overline{x(t-\tau-v)}\right\}du~dv\end{aligned}\]
Or : \[E\left\{x(t-u)~\overline{x(t-\tau-v)}\right\}=R_{xx}(\tau-u+v)\]
D’où : \[R_{yy}(t,\tau)=\int_{-\infty}^{+\infty}\int_{-\infty}^{+\infty}h(u)~\overline{h(v)}~R_{xx}(\tau-u+v)~du~dv\]
La variable \(t\) ayant disparu du second membre, elle disparaît en conséquence du premier membre, ce qui justifie l’écriture \(R_{yy}(\tau)\) et prouve la stationnarité au sens large. Enfin, en effectuant exactement le même changement de variables que précédemment, on retrouve par un calcul rigoureusement identique que \(R_{yy}(\tau)=R_{xx}(\tau)\star R_{hh}(\tau)\).
En résumé, si le signal d’entrée du filtre est aléatoire et stationnaire au sens large, le signal de sortie l’est également.
3.1.3. Densité spectrale de puissance
En appliquant la transformation de Fourier au produit de convolution précédent on obtient comme dans le cas précédent : \[S_{yy}(f)=S_{xx}(f)~|H(f)|^2\]
4. Théorème des interférences
Faisons intervenir à présent la notion de fonction d’inter-corrélation de signaux en considérant dans un premier temps deux processus aléatoires \(x_1(t)\) et \(x_2(t)\).
Elle est notée : \[R_{x_1x_2}(t,\tau)=E\left\{x_1(t)~\overline{x_2(t-\tau)}\right\}\]
Ces deux processus seront dits mutuellement stationnaires si et seulement si leur fonction d’inter-corrélation est indépendante de l’origine des temps, autrement dit si \(R_{x_1x_2}(t,\tau)\) est indépendant de \(t\). Notons que dans ce cas : \[R_{x_1x_2}(\tau)=R_{x_2x_1}(-\tau)\]
Si deux processus aléatoires sont mutuellement stationnaires : \[S_{x_1x_2}(f)=TF\{R_{x_1x_2}(\tau)\}\]
Cette quantité est appelée densité inter-spectrale de puissance ou inter-spectre du processus.
Introduisons dans le processus deux filtres FLIT dont les fonctions de transfert respectives (donc les réponses impulsionnelles) sont connues.
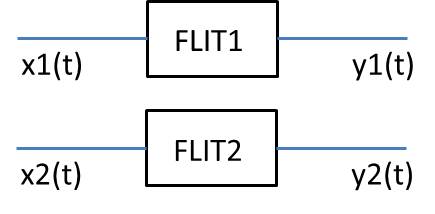 Suivant des démonstrations analogues aux précédentes, on peut montrer que les réponses sont aussi mutuellement stationnaires et que :
Suivant des démonstrations analogues aux précédentes, on peut montrer que les réponses sont aussi mutuellement stationnaires et que :
\[\begin{aligned} R_{y_1y_2}(\tau)&=R_{x_1x_2}(\tau)\star R_{h_1h_2}(\tau)\\ R_{h_1h_2}(\tau)&=\int_{-\infty}^{+\infty}h_1(t)~\overline{h_2(t-\tau})~dt\\ S_{y_1y_2}(f)&=S_{x_1x_2}(f)~H_1(f)~\overline{H_2(f)}\end{aligned}\]
